生成模型基础 | 5 归一化流
11 Normalizing Flows
生成模型是将随机噪声映射到复杂分布的东西. 归一化流
- GAN 也模拟了将噪声映射到复杂分布的过程. 不同的是, GAN 将噪声直接映射到样本 \(x\), 属于隐式模型; 流模型将噪声分布映射到样本分布 \(p_\theta(x)\), 属于显式模型.
Note 显式与隐式生成模型.
- Explicit: 直接建模 \(p_\theta(x)\),
可以计算每个样本的概率、可以通过 MLE \(\argmax_\theta\,p_\theta(\mathcal{D})\)
优化.
- AR.
- VAE, 优化 ELBO (作为似然函数的下界).
- Normalizing flow.
- Implicit: 不直接建模 \(p_\theta(x)\), 不能计算样本概率、无法通过
MLE 优化.
- GAN, 利用判别器 / 评论家近似优化目标.
11.1 Normalizing flows
设 \(\R^N\) 的非空开子集 \(\Omega\) 上的随机变量 (简单分布) \(Z\) 经过微分同胚
- \(D(g^{-1})\) 是 \(g^{-1}\) 的 Jacobi 矩阵.
- 一般取 \(Z\) 为标准 Gauss 分布 \(\mathcal{N}(0,I)\).
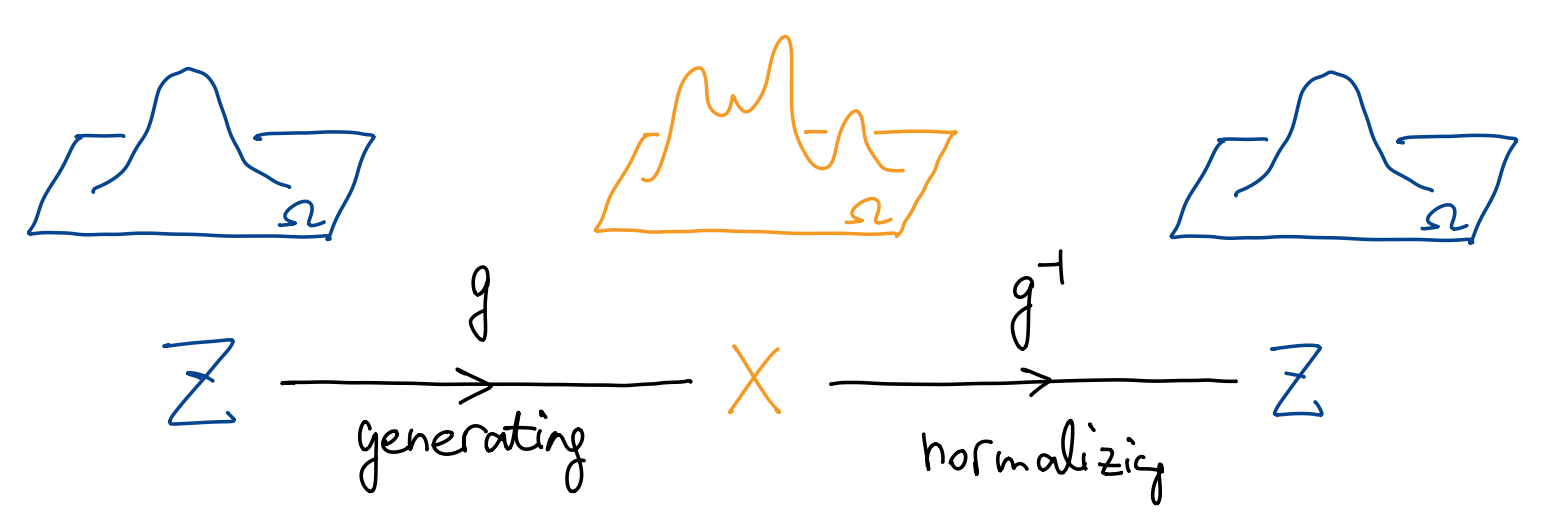
整个过程如上图所示:
- \(g\) 将一个简单分布 \(Z\) 映射到一个复杂分布 \(X\), 即生成的过程.
- \(g^{-1}\) 将一个复杂分布 \(X\) “归一化” 到一个标准分布 \(Z\). 因此这个模型也称为归一化流 (normalizing flow).
假设我们用一个神经网络 \(g_\theta(x)\) 拟合这个微分同胚, 则我们可以用 MLE 来估计参数: \[ \Align{ \operatorname{NLL}(x;\theta) = -\log p_X(x_n;\theta) = -\log p_Z(\orange{g_\theta^{-1}}(x)) -\log\Bigl| \det(D\orange{g_\theta^{-1}}|_x) \Bigr|, } \]
- 在实际操作中, 既可以建模生成过程 \(g_\theta\), 也可以建模归一化过程 \(f_\theta\).
优化完成后, 生成一个随机噪声 \(Z\sim p_Z\), 经过 \(g_\theta\) 即可完成采样, \[ X = g_\theta(Z). \]
Note 归一化流 vs VAE.
- VAE 输入样本 \(X\), 输出隐空间正态分布 \(\mathcal{N}(0,I)\) 的期望和方差.
- 归一化流输入样本 \(X\), 输出服从正态分布 \(\mathcal{N}(z;0,I)\) 的噪声 \(Z\).
由于 VAE 是一个隐式模型, 我们不好计算似然函数, 转而去优化似然函数的下界 ELBO. 这就导致 VAE 必须使用比较浅的网络, 否则会让模型退化 (见 VAE 节). 归一化流没有这个问题, 因为它直接优化对数似然, 可以放心地使用大而深的网络.
11.2 Constructing flows
神经网络 \(g_\theta\) 需要是微分同胚. 若 \[ g_\theta = g^L_\theta \circ g^{L-1}_\theta \circ \dots \circ g^1_\theta, \] 则每一层 \(g^l_\theta\) 都必须是微分同胚. 在实际场景中, 我们对每个 \(g^l_\theta\) 的要求是:
- 容易计算、容易求逆、容易求 Jacobi 矩阵.
下面看常见的几类 \(g^l_\theta\).
11.2.1 MLP
Elementwise flow. 逐元素映射 \(g(z)=(h(z_1),\dots,h(z_D))\), 其中 \(h\) 是 \(\R\) 上的微分同胚.
- 计算简单, 复杂度为 \(O(D)\),
- \(g^{-1}(x)=(h^{-1}(x_1),\dots,h^{-1}(x_D))\),
- \(\det(Dg^{-1}|_x)=\prod_{i=1}^D\det(Dh^{-1}|_{x_i})\).
- 无法提取元素之间的关系.
Linear flow. 线性层 \(g(z)=Az+b\), 其中 \(A\) 可逆.
自由度为 \(D^2\).
计算 \(A^{-1}\) 和 \(\det{A}\) 的时间复杂度为 \(O(D^3)\), 代价太高了.
Linear flow with triangular matrix: 限制 \(A\) 为可逆的上三角矩阵,
- 自由度为 \(D(D+1)/2\).
- 计算 \(\det{A}\) 的时间复杂度为 \(O(D)\), 然而计算 \(A^{-1}\) 的时间复杂度为 \(O(D^2)\), 还是太高.
Linear flow with orthogonal matrix: 限制 \(A\) 为正交阵,
自由度为 \(D(D-1)/2\).
有 \(\det{A}=1\) 以及 \(A^{-1}=A\T\), 转置一般可以实现 \(O(1)\) 时间复杂度.
然而这是一个带约束的优化, 即在梯度下降过程中必须保证 \(A\) 一直是正交阵, 这不太容易. 一个退而求其次的办法是考虑正交阵的一个子集, 即所有 “关于超平面的反射变换” (Householder transforms), 形如 \[ R(v_1,\dots,v_D) = I - \frac{2}{v\T v}vv\T, \qquad v \in \R^D\setminus\{0\}. \] 自由度从 \(D(D-1)/2\) 变成了 \(D\), 但是 \((v_1,\dots,v_D)\) 可以取 (几乎) 任意向量, 是一个无约束优化问题.
11.2.2 Residual blocks
可逆 MLP 的表达能力有限. 一种更重要的模块是残差模块.
Residual flow 1. 形如 \(g(z)=z+h(z)\),
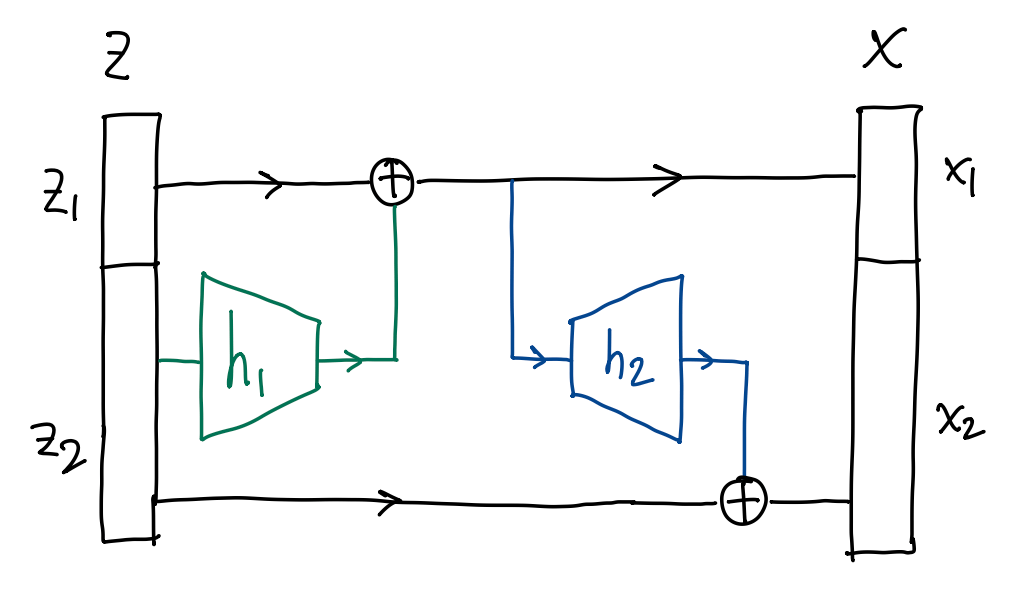
首先将输入 \(z\in\R^D\) 分为两部分 \(z=(z_1,z_2)\), 其中 \(z_1\in\R^{d_1},z_2\in\R^{d_2}\) 且 \(d_1+d_2=D\).
任取映射 \(h_1:\R^{d_2}\to\R^{d_1}\) 以及 \(h_2\in\R^{d_1}\to\R^{d_2}\), 构造 \[ \Align{ x_1 &= z_1 + h_1(z_2) \in\R^{d_1}, \\ x_2 &= z_2 + h_2(x_1) \in\R^{d_2}, } \] 令 \(g(z):=(x_1,x_2)\) 即可. 这称为耦合层 (coupling layer), 如上图所示.
此时 \(g\) 总是可逆的, 且 \[ \Align{ z_2 &= x_2 - h_2(x_1), \\ z_1 &= x_1 - h_1(z_2) = x_1 - h_1(x_2 - h_2(x_1)). } \]
Jacobi 矩阵 \[ Dg|_z = \pmqty{ I_{d_1} & Dh_1|_{z_2} \\ Dh_2|_{x_1} & I_{d_2} + Dh_2|_{x_1} Dh_1|_{z_2} }, \] 以及 \[ Dg^{-1}|_x = \pmqty{ I_{d_1} + Dh_1|_{z_2} Dh_2|_{x_1} & -Dh_1|_{z_2} \\ Dh_2|_{x_1} & I_{d_2} }. \]
Residual flow 2. 形如 \(g(z)=z+h(z)\),
- 我们只需限制 \(h\) 的 Lipschitz 常数 \(L<1\) (压缩映射) 即可, 此时 \(g\) 可逆.
在实操中, 通常对残差模块加入更多设计以确保计算高效. 这里举出一例.
RealNVP
仍旧将输入 \(z\in\R^D\) 分为两部分 \(z=(z_1,z_2)\), 其中 \(z_1\in\R^{d_1},z_2\in\R^{d_2}\) 且 \(d_1+d_2=D\).
任取 \(s,t:\R^{d_1}\to\R^{d_2}\) (原文中为仿射变换), 定义 \[ \Align{ x_1 &= z_1, \\ x_2 &= z_2 \odot \exp[s(z_1)] + t(z_1), } \] (其中 \(\odot\) 是向量逐元素乘法, \(\exp\) 是逐元素指数函数) 令 \(g(z):=(x_1,x_2)\). 这称为仿射耦合层 (affine coupling layer).
此时 \(g\) 总是可逆的, 且 \[ \Align{ z_1 &= x_1, \\ z_2 &= [x_2-t(x_1)] \odot \exp[-s(x_1)]. } \]
Jacobi 矩阵 \[ Dg|_z = \pmqty{ I_{d_1} & 0 \\ * & \diag[\exp\!\pqty{s(z_1)}] }, \qquad Dg^{-1}|_x = \pmqty{ I_{d_1} & 0 \\ * & \diag[\exp\!\pqty{-s(x_1)}] } \] 是下三角阵! 行列式就是对角元素的乘积, 非常容易计算.
12 Continuous Normalizing Flows
12.1 From discrete to continuous
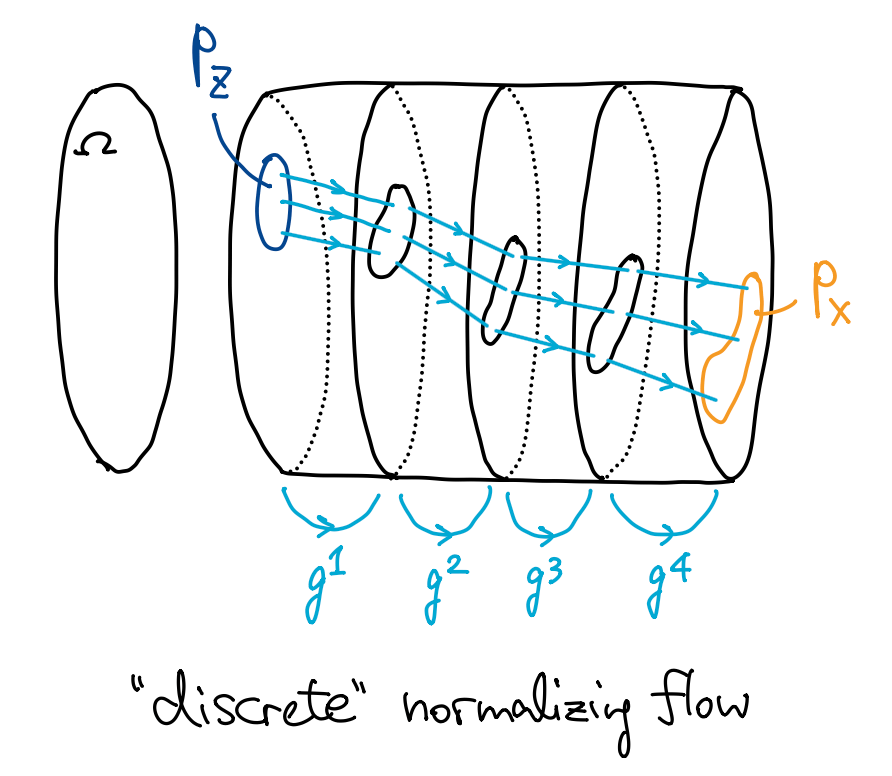
上一节我们讲的是一种 “离散” 的流 (discrete normalizing flow, DNF). 从最初的随机噪声 \(Z\) 开始, 一层一层地应用微分同胚 \(g^l(z)\), 最终达到目标 \(X\). 层数 \(l=1,2,\dots,L\) 可以看作离散的时间维度, 随着层数增加, 原始分布一点一点被推到目标分布, 如下图.
若以残差块 \(g^l(z):=z+h(z;\theta^l)\) (其中每一层的结构相同, 但是参数 \(\theta^l\) 不同) 作为每一层的映射, 则 DNF 可以写成一个迭代过程 \[ \Cases{ z^{l+1} = z^l + h(z^l;\theta^l), \\ z^0 \textsf{ 为给定的初始值}, } \] 当层数 \(L\) 足够多且残差映射 \(h\) 的输出足够小, 则该迭代过程实际上是在求解下面的初值问题: \[ \Cases{ \displaystyle \eval{\dv{z}{t}}_t = V_\theta(z(t),t), \\ z(t_0)=z_0 \textsf{ 为给定的初始值}, } \tag{$\clubsuit$} \] (使用 Euler 迭代法), 其中 \(t\) 的取值范围是区间 \(I\subset\R\), 映射 \(V_\theta(z,t)\) 连续可微.
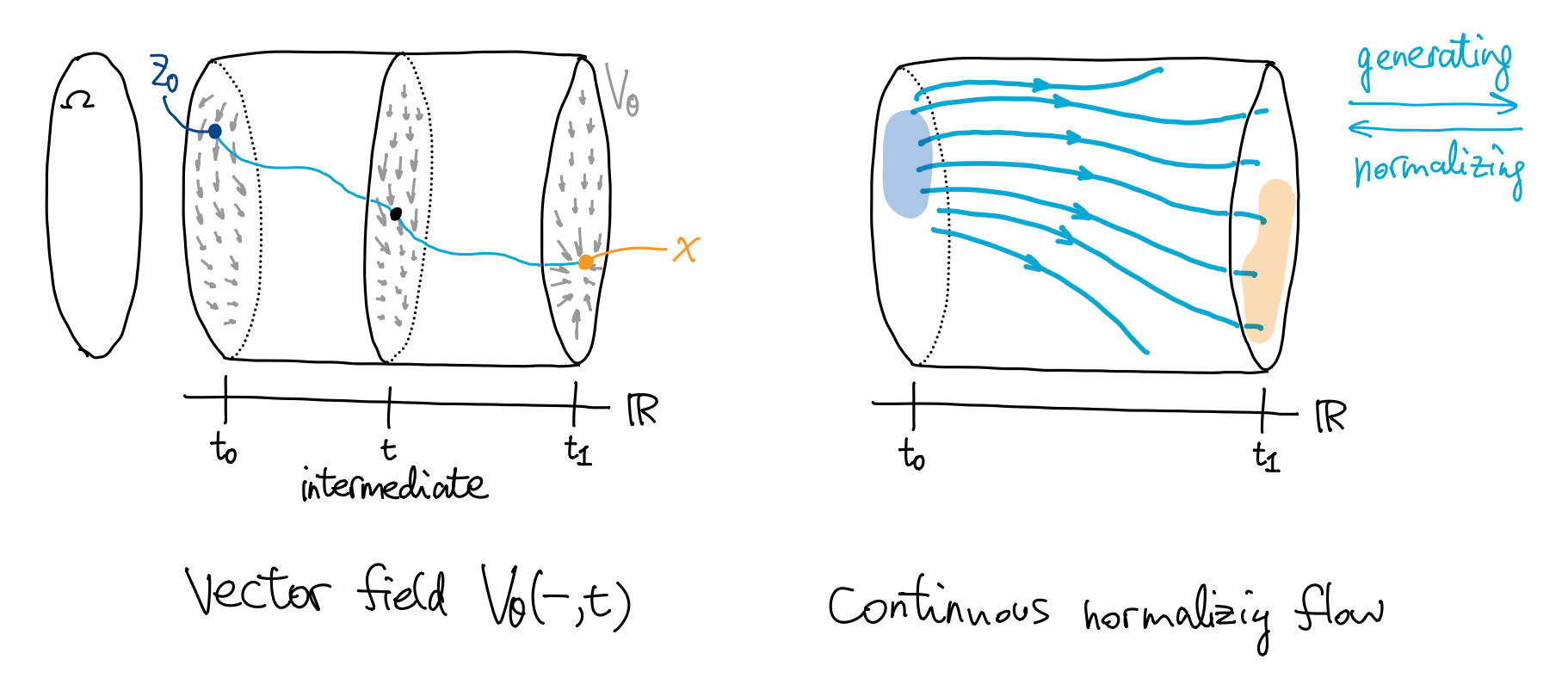
这里简单回顾常微分方程 (ODE) 理论. 式 \((\clubsuit)\) 是一个一阶非自治常微分方程. 映射 \[ V_\theta(-,-):\Omega\times I\to\R^N \] 称为该 ODE \((\clubsuit)\) 的向量场 (vector field), 如下图左侧.
我们有如下定理: 当 \(V_\theta\) 连续可微 (\(C^1\)) 时,
(存在性) 任给 \(p\in\Omega\) 和 \(t\in I\), 存在包含 \(t\) 的区间 \(I_0\subset I\) 以及 \(p\) 的邻域 \(U_0\subset\Omega\), 使得对任意初值 \(z_0\in U_0\) 和初始时刻 \(t_0\in I\), 存在初值问题 \((\clubsuit)\) 的解 \(z:I\to\Omega\).
(唯一性) 两条积分曲线在公共部分重合.
(对初值的光滑依赖性) 记号承上, 定义 \(\Phi:I_0\times I_0\times U\to\Omega\), \[ \Phi(t,t_0,z_0) := z(t), \] 其中 \(z\) 是以 \(z(t_0)=z_0\) 为初值的唯一积分曲线. 则 \(\Phi\) 是 \(C^1\) 的.
映射 \(\Phi\) 称为向量场 \(F_\theta\) 的流 (flow), 如上图右侧.
- 直观上, 固定开始时刻 \(t_0\) 不变, 则随着 \(t\) 变化, \(\Phi(t,t_0,z_0)\) 让 \(U\) 中的所有 \(z_0\) 光滑地 “流动” 起来.
- 根据初值问题解的唯一性, 映射 \(z_0\mapsto\Phi(t_1,t_0,z_0)\) 是可逆的, 逆为 \(z_1\mapsto\Phi(t_0,t_1,z_1)\). 正向流表示生成过程; 逆向流表示归一化过程.
现在我们引入连续归一化流 (CNF)
Note CNF vs DNF.
CNF 建模的是迭代过程 \(h(-,\theta)\), 也即流 \(\Phi(t,t_0,z_0)\), 这要求神经网络必须是可逆的; 而 DNF 建模向量场 \(V_\theta\), 只要它满足适当的光滑性条件, 根据存在唯一性定理, 对应的流 \(\Phi\) 必定是可逆的, 因此 CNF 的网络比 DNF 灵活得多.
12.2 CNFs
CNF 的训练和采样流程与 DNF 基本相同:
| DNF | CNF | |
|---|---|---|
| 训练 | ① 根据 \(p_Z\) 和 \(V_\theta\) 计算出 \(p_X\) | ① 根据 \(p_Z\) 和 \(g_\theta\) 计算出 \(p_X\) |
| ② 利用 \(p_X\) 计算似然, 用 MLE 优化 \(\theta\) | ② 利用 \(p_X\) 计算似然, 用 MLE 优化 \(\theta\) | |
| 采样 | ① 从 \(p_Z\) 采样噪声 \(z_0\in\Omega\) | ① 从 \(p_Z\) 采样噪声 \(z_0\in\Omega\) |
| ② 求解初值问题, 得到 \(x:=\Phi(t_1,t_0,z_0)\) | ② 前向传播, 得到 \(x:=(g^L_\theta\circ\dots\circ g^1_\theta)(z_0)\) |
对于 CNF, 我们有如下连续版本的 “变量替换定理” (推导见后文): \[ \pdv{\log{p_t(z(t))}}{t} = -\tr\biggl( \eval{\pdv{V_\theta}{z}}_{z(t),t} \biggr), \] 积分得到 \[ \Align{ \log{p_X(x)} = \log{p_{t_1}(z(t_1))} &= \log{p_{t_0}(t)} + \int_{t_0}^{t_1} \pdv{\log{p_t(z(t))}}{t} \dd{t} \\ &= \log{p_{Z}(z_0)} - \int_{t_0}^{t_1} \tr\biggl( \eval{\pdv{V_\theta}{z}}_{z(t),t} \biggr) \dd{t}. } \] CNF 的训练目标是最大化 \(\log p_X(x)\), 即找到一个速度场 \(V_\theta\), 使得:
- 起点密度高: \(\log p_Z(z_0)\) 较高.
- 体积收缩: 积分项 \(\int \dots \dd{t}\) 较小, 或最好为负值 (对应于体积收缩).
积分项中需要代入积分曲线 \(z(t)\) 在每一时刻的值, 我们可以使用 ODE 求解器 (如 Runge-Kutta 方法) 来逼近流线 \(z(t)\).
- 我们还需要计算 \(z(t)\) 关于参数 \(\theta\) 的梯度, 然而 \(z(t)\) 是 ODE 求解器的输出, 不好直接进行反向传播. 原文采用了 adjoint sensitivity method.
CNF 的优势:
- 可以使用任何复杂网络拟合向量场 (不必是可逆的, 也不必易于计算 Jacobian), 表达能力强.
- MLE 中根据 \(x\) 计算 \(z_0\) 的过程 (归一化) 与生成过程计算代价相同.
Pf 变量替换定理.
- 直观: CNF 版本的变量替换定理是 DNF 版本在 “\(\Delta t\to0\)” 下的 “极限”, 可以理解为在无穷小变换下, 概率密度的变化率.
- 迹 \(\tr\) 是行列式 \(\det\) 的 “微分” (改变量无穷小时的线性近似), 因此 CNF 版本中是 \(\tr\) 而非 \(\det\).
记 \(p_t\) 是 \(t_0\) 时刻的初始分布 \(p_Z\) 被流 \(z\mapsto\Phi(t,t_0,z)\) 推得的分布. 考虑 \(p_t\) 与 \(p_{t+\varepsilon}\), 满足
- \(p_{t+\varepsilon}\) 是 \(p_t\) 被微分同胚 \(T_\varepsilon:z\mapsto\Phi(t+\varepsilon,t,z)\) 推得的.
根据 (离散) 变量替换定理有 \[ \Align{ \log{p_{t+\varepsilon}(z(t+\varepsilon))} - \log{p_t(z(t))} &= \log\Biggl| \biggl( \det \eval{ \pdv{T_\varepsilon}{z} }_{z(t)} \biggr)^{\!\!-1} \Biggr| \\ &= -\log\Biggl| \det \eval{ \pdv{T_\varepsilon}{z} }_{z(t)} \Biggr|. \\ } \] 根据定义有 \[ \Align{ T_\varepsilon\bigl[z(t)\bigr] &= z(t+\varepsilon) \\ &= z(t) + \varepsilon V_\theta(z(t),t) + O(\varepsilon^2), } \] (其中 \(\varepsilon\to0\)) 即 \(T_\varepsilon(-)=I+\varepsilon V_\theta(-,t)+O(\varepsilon^2)\). 代入变量替换定理得到 \[ \Align{ \log{p_{t+\varepsilon}(z(t+\varepsilon))} - \log{p_t(z(t))} &= -\blue{\log} \,\blue{\det} \biggl[ I + \varepsilon \eval{\pdv{V_\theta}{z}}_{z(t),t} + O(\varepsilon^2) \biggr] \\ &= -\blue{\log} \biggl[ 1 + \varepsilon \,\blue{\tr} \eval{\pdv{V_\theta}{z}}_{z(t),t} + O(\varepsilon^2) \biggr] \\ &= -\biggl[ \varepsilon \,\blue{\tr} \eval{\pdv{V_\theta}{z}}_{z(t),t} + O(\varepsilon^2) \biggr]. } \] 利用导数的定义即得.